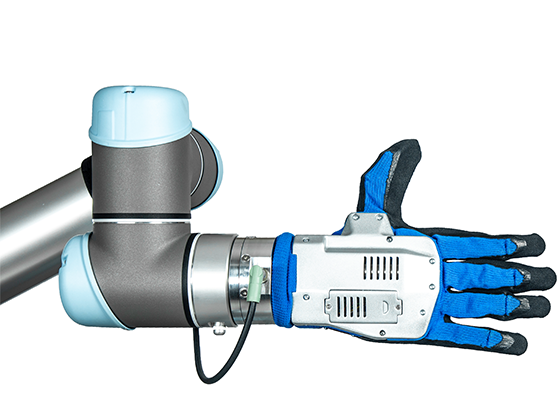
qb SoftHand Research
qb SoftHand Research is an anthropomorphic robotic hand based on soft-robotics technology, flexible, adaptable and able to interact with the surrounding environment, objects and humans while limiting the risk of hurting the operators, spoiling the products to be handled, and damaging the robot itself. it is 100% compliant with the UR+ ecosystem.
- Description
- Specifications
- Gallery
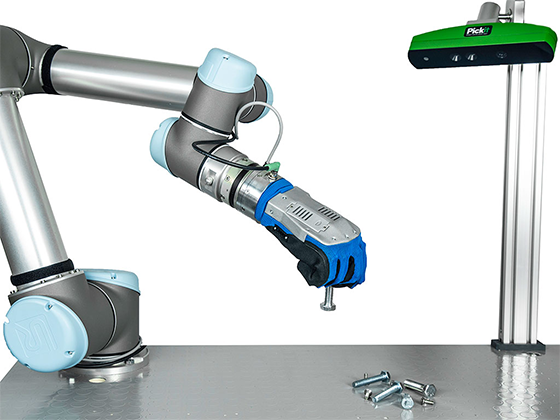
The qb SoftHand Research is able to replicate about 75% of the grips of a human hand, and] its inherent mechanical intelligence it is able to adapt naturally to the objects it is picking without the need for sophisticated sensors that require equally sophisticated electronic programming.
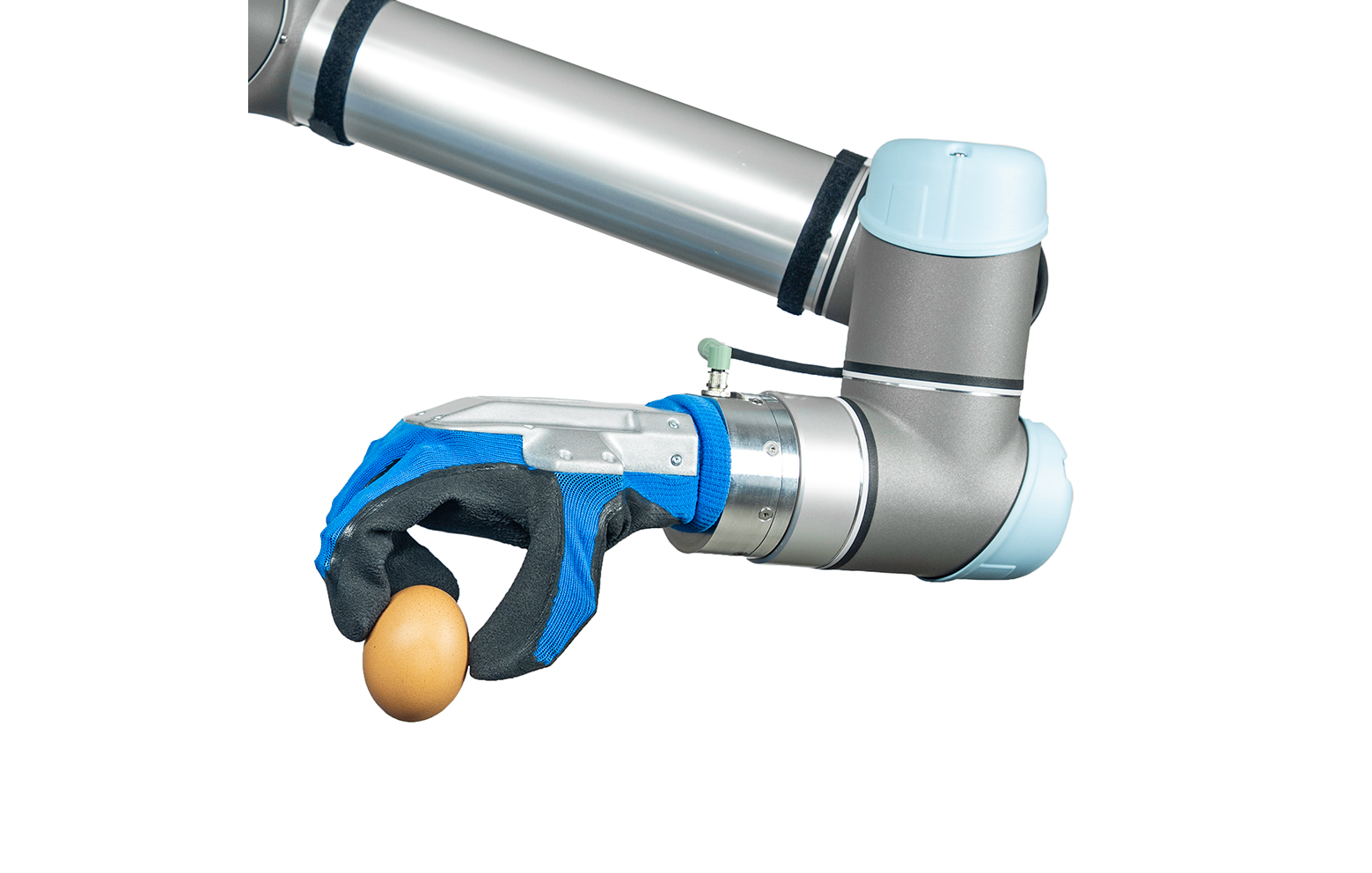
The qb SoftHand Research is adaptable and can grasp different objects without any change in the control action, showing an unparalleled level of simplicity and flexibility. Soft nature the hand by qbrobotics exploits the principles of synergies in a simple and intrinsically intelligent design that is safe in unexpected human-robot interaction.
The combination of these innovations results in a flexible prehensile device that can grasp a wide variety of objects. This is what we call MechaLogical. The single-motor actuation makes the hand plug-and-play and simple-to-control (one single motor requires one single control signal to close and open the whole hand) and affordable. The robotic hand qb SoftHand Research can be easily integrated with main cobot brands in the market and is also is 100% compliant with the UR+ ecosystem.
The qb SoftHand Research has been designed for the educational sector and it’s dedicated to research institutes, universities, schools, testing laboratories and R&D departments of private and public companies.
- Flexible, Adaptive & Robust
- 19 anthropomorphic DOFs, one synergy, one motor
- Dislocatable, self-healing finger joints
- Grasp force 62N (pinch configuration)
- Nominal payload 1,7kg (pinch configuration)
- From wide open to clenched fist in 1.1 s
- USB & RS485 interfaces
- ROS Compatible
- UR+ Certified by Universal Robots
- Weight: 500g
- Feedback: motor position and motor current
| QB Softhand Research | QB Softhand Industry | |
| End User | Educational, Academic, R&D | Industrial |
| Weight (Kg) | 0.78 | 0.99 |
| Max Payload (Kg) | ||
| Pinch Grasp | 0.83 | 0.6 |
| Power Grasp | 1.7 | 2 |
| Voltage (VDC) | 12.24 | 24 |
| Golve | Integrated | Interchangeable |
| Dimension (mm) | ||
| Width | 191 | 185 |
| Lengh | 250 | 244 |
| Thickness | 71 | 83 |
| Flange Interface | ||
| ISO 9409-1-31.5-4-M5 | + | + |
| ISO 9409-1-40-4-M6 | + | + |
| ISO 9409-1-50-4-M7 | ü | ü |
| Wrist | Fixed | 12 Pitch pre-sets (0°-90°) |
| Communication Protocol | RS-485 | EtherCAT, UDP, Digital I/Os |
| Software | ||
| ROS | ü | + |
| Matlab Simulink | ü | + |
| C/C++ API | ü | ü |
| UR+ | ü | ü |
| Franka App | + | + |
| Electronic Driver | Embedded | External |
| IP Code | - | IP65 |
| Normative Compliance | - | ISO 12100 ISO/TS 15066 ISO 13849-1/-2 ISO 10210-1/-2 ISO 9409-1-50-4-M6 ISO/TR 20218-1 IEC 60529 IEC 61000-6-1/-6-2 |
| ü -
Available '+ - On Request |