qb SoftHand Industry
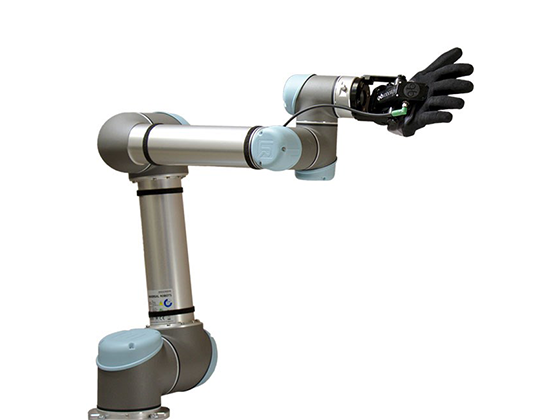
qb SoftHand Industry is a new advanced anthropomorphic robotic hand based on soft-robotics technology and designed by qbrobotics for industrial tasks, which complies to the standards and certifications of industrial and collaborative robotics and is compatible with the main collaborative robots (cobots) on the market and it is 100% compliant with the UR+ ecosystem.
- Description
- Specifications
- Gallery
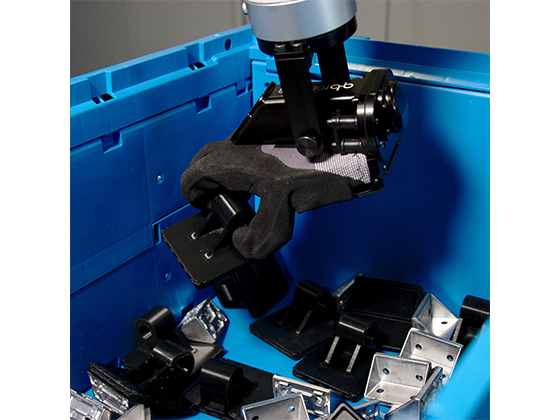
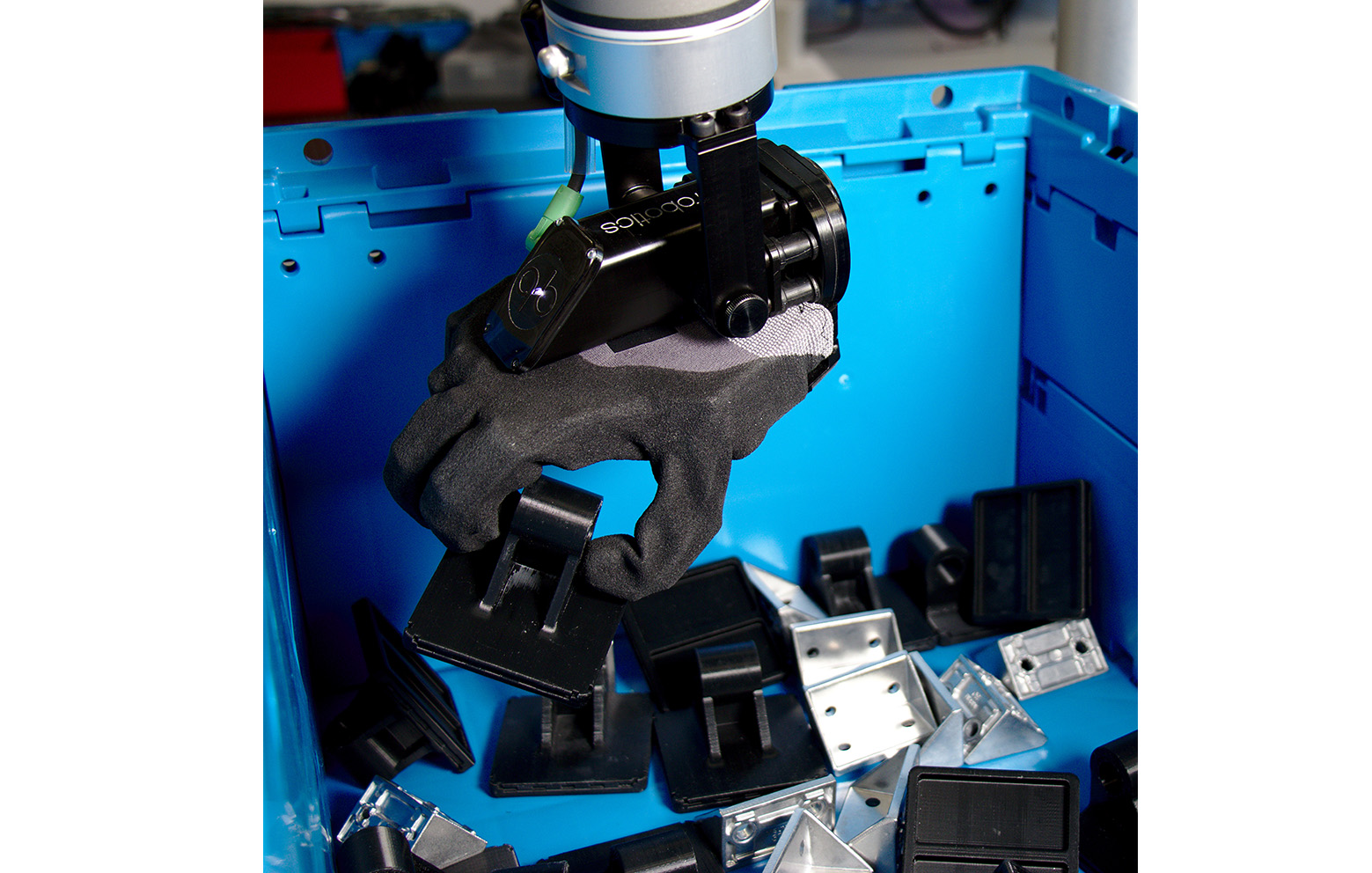
The qb SoftHand Industry is the first anthropomorphic robotic hand designed specifically for industrial applications and tasks certified as “collaborative gripper”.It is entirely collaborative from a Hardware point of view, indeed the materials used, and the flexibility of the system allow the Hand to be safe and harmless in any situation of accidental impact.
The actuation system is tendon-driven and features a single motor to open and close the 5 fingers together while replicating the first synergy of the human hand movement in a flexible and adaptable grasp. The five mechanically independent fingers allow this end-effector to have both a large gripping surface and an adaptability not found in other grippers.
The intrinsic Logic and humanoid shape make this device perfect for all industrial testing applications where the effects of human manipulation must be verified.
The new robotic hand qb SoftHand Industry offers a plug-and-play robot-hand integration, due to its ease of use and control, and can be used whenever is required to replicate the grasping movements of a human hand. The list of tasks that can be tackled by a system integrating the qb SoftHand Industry include:
Features
- Flexible, Adaptive & Robust
- 5 human-like fingers
- 19 anthropomorphic DOFs, one synergy, one motor
- Power grasp payload: 2 kg
- Pinch grasp payload 0.6 kg
- Full closing time: 1.2 s
- Plug&Play
- Weight: 0.89 kg
- Communication protocols: EtherCAT, UDP
- Adjustable wrist mounting position
- interchangeable gloves for special applications
- Water and dust resistance: IP65
- UR+ Certified
- 3 International patents
Certifications & Standards
- TUV Sud Certification
- ISO 12100
- ISO/TS 15066
- ISO 13849-1/-2
- ISO 10210-1/-2
- ISO 9409-1-50-4-M6
- ISO/TR 20218-1
- IEC 60529
- IEC 61000-6-1/-6-2
- Testing
- Quality inspection
- Pick & Place
- Complex handling
- Assembly
- Machine tending
- R&D
- Service robotics
- Human assistance
| QB Softhand Research | QB Softhand Industry | |
| End User | Educational, Academic, R&D | Industrial |
| Weight (Kg) | 0.78 | 0.99 |
| Max Payload (Kg) | ||
| Pinch Grasp | 0.83 | 0.6 |
| Power Grasp | 1.7 | 2 |
| Voltage (VDC) | 12.24 | 24 |
| Golve | Integrated | Interchangeable |
| Dimension (mm) | ||
| Width | 191 | 185 |
| Lengh | 250 | 244 |
| Thickness | 71 | 83 |
| Flange Interface | ||
| ISO 9409-1-31.5-4-M5 | + | + |
| ISO 9409-1-40-4-M6 | + | + |
| ISO 9409-1-50-4-M7 | ü | ü |
| Wrist | Fixed | 12 Pitch pre-sets (0°-90°) |
| Communication Protocol | RS-485 | EtherCAT, UDP, Digital I/Os |
| Software | ||
| ROS | ü | + |
| Matlab Simulink | ü | + |
| C/C++ API | ü | ü |
| UR+ | ü | ü |
| Franka App | + | + |
| Electronic Driver | Embedded | External |
| IP Code | - | IP65 |
| Normative Compliance | - | ISO 12100 ISO/TS 15066 ISO 13849-1/-2 ISO 10210-1/-2 ISO 9409-1-50-4-M6 ISO/TR 20218-1 IEC 60529 IEC 61000-6-1/-6-2 |
| ü -
Available '+ - On Request |